
Fernwärmeleitungen arbeiten im Verborgenen und sind ein wichtiger Teil städtischer Infrastruktur. Versorgt werden damit Privathaushalte und Gebäude, wie Schulen oder Krankenhäuser mit Wärme, die hauptsächlich zum Heizen verwendet wird. Die einzelnen Rohrleitungen sind unter der Erde verlegt und bilden ein weitverzweigtes Netz im gesamten Innenstadtgebiet.
Eine vollflächige Überprüfung und Sanierung des Netzes von Außen ist in der Praxis nicht möglich, weil Fernwärmeleitungen unter stark befahrenen Straßen, Tunneln, S- und U-Bahnen verlegt sind.

{kind=link}
{kind=link}
Erhebliche Kostenersparnis
In der Metropole Rotterdam wurden im Sommer 2006 und 2007 mehrere Bereiche des Fernwärmenetzes mit einem speziellen Ultraschall-Prüfroboter inspiziert und nach Außenkorossion geprüft. Detektierte Bereiche konnten dann gezielt saniert und ein großflächiger Austausch der Rohrleitungen vermieden werden. Das hat zu einer nicht unerheblichen Kostenersparnis beigetragen.
Der in Rotterdam eingesetzte Prüfroboter wurde in Zusammenarbeit mit ApplusRTD b.v. entwickelt. Er kann Rohrleitungen im Durchmesserbereich von ca. 300 bis 600 mm auf einer Gesamtlänge von bis zu 250 Meter durchfahren und diese von innen detailliert prüfen. Weiterhin ist er in der Lage mithilfe modernster Ultraschall-Prüftechnik die jeweilige Wandstärke der Leitung zu 100 % exakt festzustellen und eventuelle Außen- oder Innenschäden zu detektieren.
Als großer Vorteil des Ultraschall- Prüfroboters erweist sich einmal mehr dessen flexible Bauweise. Er kann unter sehr beengten Bedingungen in die Rohrleitung eingesetzt werden und enge Bögen passieren. Zum Einsetzen muss lediglich eine Öffnung von ca. 400 mm in axialer Richtung geschaffen werden. Dies kann man z. B. durch den Ausbau von Kompensatorelementen erreichen. Weitere Maßnahmen sind nicht notwendig.
Dieser Vorteile hat sich auch der niederländische Energieversorger ENECO b.v. bedient, unter dessen Mitwirken der Ultraschall-Prüfroboter für den Spezialeinsatz angepasst wurde.
Daten stehen in Echtzeit zur Verfügung
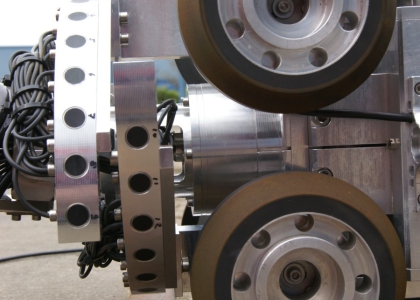
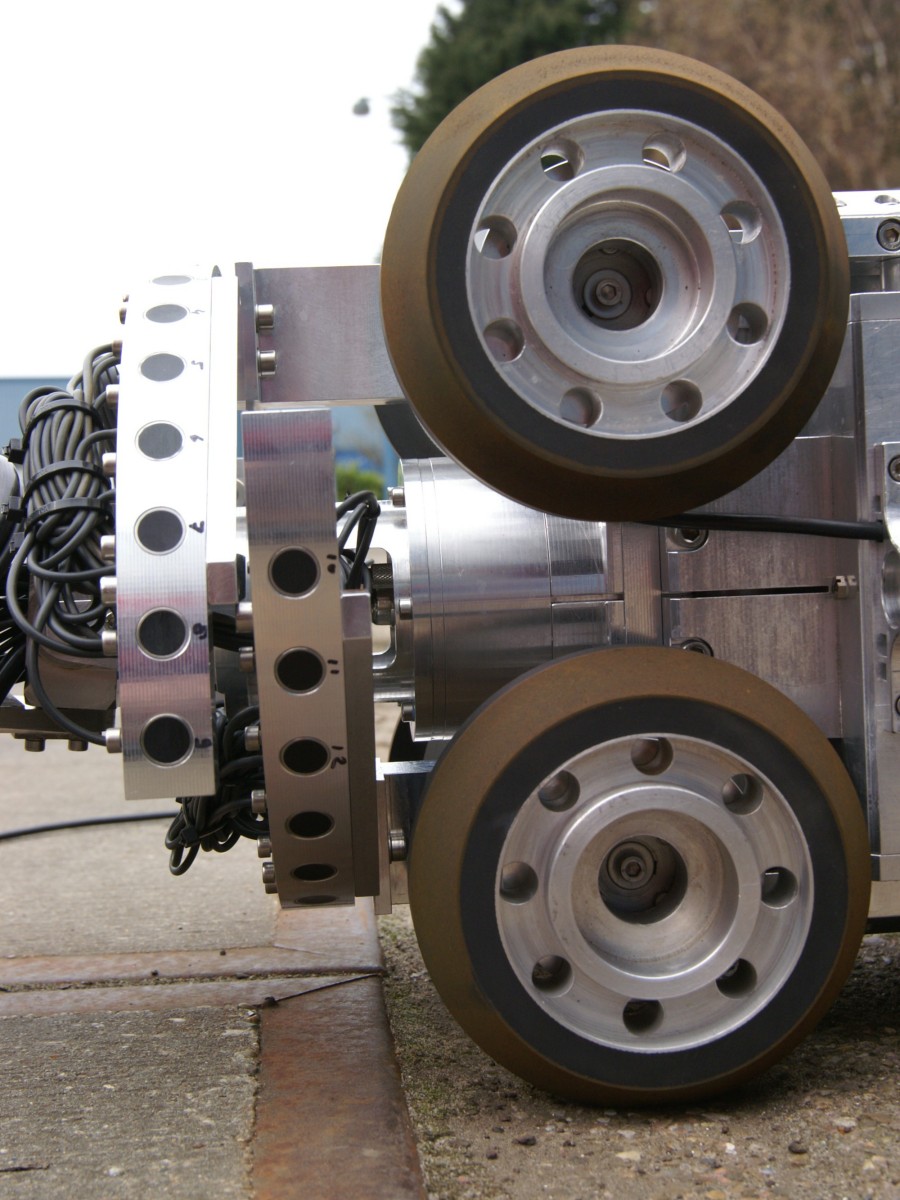
Der Prüfroboter besteht aus zwei Antriebselementen, deren Räder pneumatisch an die Rohrinnenwand gepresst werden. Sie entwickeln somit eine hohe Zugkraft, die für längere Rohrleitungsabschnitte mit Bögen notwendig ist. An deren Ende ist ein Elektronikmodul für die Ultraschallprüftechnik adaptiert. Ein spezielles Kabel verbindet den Prüfroboter mit der Steuer- und Auswerteeinheit für die Prüftechnik. Just in time: Alle Ultraschalldaten stehen sofort in Echtzeit zur Verfügung und können bereits während der Prüfung ausgewertet werden.
Die Installation einer Inspektionskamera gewährleistet den Überblick in der Rohrleitung. Am hinteren Antriebselement ist der Prüfkopfträger mit den insgesamt 32 Ultraschallprüfköpfen angebracht. Bestehend aus zwei halbkreisförmigen Teilelementen kann er pneumatisch an die Rohrinnenwand gefahren werden. Der Träger ist verstellbar und ermöglicht die genaue Anpassung an die Rohrleitungsgröße.
Für den Fall, dass die Rohrleitung nicht vollständig mit Wasser zu befüllen war, gelangte ein zweites Ultraschall-Prüfelement mit 32 Sensoren zum Einsatz. Über eine Art Kammer mit zwei Abdichtscheiben konnte diese mit Wasser gefüllt werden.