
Im Forschungsprojekt MAKRO wurde ein Prototyp einer mehrsegmentigen, kabellosen Roboterplattform entwickelt, der es ermöglichen soll, in unzugänglichen Abwasserkanälen autonom ohne Kabel zu arbeiten. Das Projekt wurde vom Bundesministerium für Bildung und Forschung gefördert.


{kind=link}
{kind=link}
{kind=link}
Projektziel
Die gegenwärtig praktizierte Form der Kanalinspektion ist recht aufwändig und beschränkt sich auf die kabelgebundene Inspektion. MAKRO plus soll die Kanalüberwachung durch Autonomie (er besitzt keine Kabelverbindung mehr) vereinfachen und gleichzeitig um neue Überwachungs- und Prüfaufgaben ergänzen. MAKRO plus wurde während der Projektzeit in den Abwasserkanälen der Stadt Siegburg unter realen Bedingungen getestet.
Robotermechanik
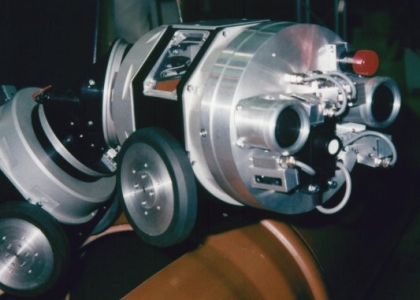
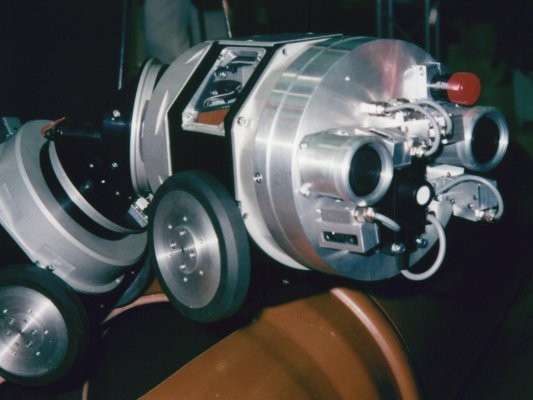
MAKRO plus ist ein Serviceroboter, der mit 25 Antrieben ausgestattet, äußerst gelenkig durch die Kanäle "schlängelt". In 7 Antriebsmodulen kommen zwei Akkupacks für die Energieversorgung, ein PC104-Rechner, zwei Kopfmodule – MAKRO plus ist symmetrisch aufgebaut – und zwei "Ladebuchten" für Anwendungsmodule unter. Die drei Freiheitsgrade der Gelenkmodule zwischen den Antriebsmodulen sorgen für die Gelenkigkeit, enge Bögen zu durchfahren, in Abzweige einzubiegen, sowie Stufen und Hindernisse zu überwinden.
Elektronik
Die hoch integrierte Elektronik setzt digitale Signalprozessoren zur Motorsteuerung und zur Auswertung der periodisch absolut messenden Winkelgeber ein. Die Kommunikation zur Inbetriebnahme des Roboters findet energiesparend über einen I²C-Bus statt. Für die Roboterplattform selbst und die Anwendungsmodule steht jeweils ein eigener CAN-Bus zur Verfügung. Kamerabilder werden über eine Firewire-Verbindung zum PC104 übertragen. Im Bereich der Kanalschächte wird mit MAKRO plus über eine WLAN-Verbindung kommuniziert. Einige Meter nach dem Schacht bricht die Verbindung ab. MAKRO plus arbeitet nun völlig autonom. Nur ein "Lebensrettungspiepser" verrät jetzt noch den Aufenthaltsort.
Missionssteuerung
Anhand der Daten des Kanalkatasters wird eine Mission für den Roboter zusammengestellt, die aus einer Reihe von Inspektionsaufgaben besteht. Eine Planungssoftware berechnet die zu fahrende Route. Die Robotersteuerung auf dem PC104-Rechner navigiert mit Hilfe der Laser- und Infrarotsensoren in den Kopfmodulen, die Schächte erkennen und Hindernisse entdecken. Ist ein Hindernis unüberwindbar und damit ein Weg versperrt, so wird dieses kartiert und eine Neuplanung für die verbleibenden Inspektionsaufgaben durchgeführt.
Anwendungsmodule
MAKRO plus ist eine autonome Serviceroboter Plattform, die erst durch ihre Nutzlasten zum spezifischen Kanalroboter wird. Ein Chemiemodul zieht eine Abwasserprobe auf und misst pH-Wert, Leitfähigkeit, O2 und die Temperatur. Auffällige Proben können zur weiteren Analyse aus dem Kanal herausgebracht werden. Ein Navigationsmodul mit Beschleunigungsaufnehmern und drei Faserkreiseln vermisst das Kanalgefälle und den Rohrverlauf zur Unterstützung der Mission und zur Korrektur und Präzisierung der Kanalkatasterdaten. Neue Nutzlastmodule können künftig den Einsatzbereich von MAKRO plus auf völlig neue Anwendungsfelder erweitern.